
In precision agriculture, the integration of advanced technologies is essential to optimize farming practices, increase productivity, and reduce operational costs. Among the key innovations is the GNSS (Global Navigation Satellite System) Auto-Steering system, which automates tractor movement for greater accuracy and efficiency. A critical component of these systems is the IMU (Inertial Measurement Unit), which enhances the precision and reliability of steering control. This blog will explore the role of IMU in tractor GNSS Auto-Steering systems, explain how it works, and discuss its benefits in the agricultural industry.
What is IMU (Inertial Measurement Unit)?
An Inertial Measurement Unit (IMU) is a device used to measure and report a vehicle’s acceleration, angular velocity, and sometimes the magnetic field surrounding the vehicle. It is composed of accelerometers, gyroscopes, and, in some cases, magnetometers. These sensors provide data on the vehicle’s movements, such as pitch, yaw, and roll, which are essential for determining its orientation and position in space. In tractor GNSS Auto-Steering systems, the IMU helps track the tractor’s orientation in three dimensions, especially when GNSS signals are not sufficient to provide complete positional data.
How Does IMU Work in Tractor GNSS Auto Steering System?
In a tractor GNSS Auto-Steering system, the IMU works alongside GNSS receivers to ensure high levels of precision and stability in vehicle positioning. While the GNSS provides data on the tractor’s geographical location (latitude, longitude, and altitude), the IMU contributes by measuring the tractor’s orientation in terms of roll, pitch, and yaw, compensating for any minor variations in positioning. When GNSS data alone cannot provide a complete and accurate picture—such as in areas with obstructed satellite visibility—the IMU fills in the gaps, maintaining control over the vehicle’s trajectory.
Data Fusion Between GNSS and IMU
The combination of GNSS and IMU data is essential for the precise operation of tractor Auto-Steering systems. By continuously gathering information about the tractor’s position and orientation, the system can seamlessly adjust the tractor’s steering to keep it on the predetermined path. For instance, if the tractor turns or operates on uneven terrain, the IMU will detect changes in orientation and provide corrective inputs to the steering mechanism. This fusion of GNSS and IMU data ensures that the tractor follows the path with minimal deviation, even in areas with compromised GNSS signals.
1. GNSS Data (Global Navigation Satellite System)
GNSS provides the tractor’s position (latitude, longitude, altitude) and velocity by receiving signals from satellites. It’s accurate and can be corrected with various augmentation systems like RTK (Real-Time Kinematic) or DGPS (Differential GNSS) to achieve centimeter-level accuracy, which is essential for precise path-following in agricultural operations.
However, GNSS signals are susceptible to interference, particularly in challenging environments such as:
- Dense vegetation or trees, which can obstruct signals.
- Urban canyons, where tall buildings reflect and block signals.
- Poor weather conditions, like heavy rain or fog.
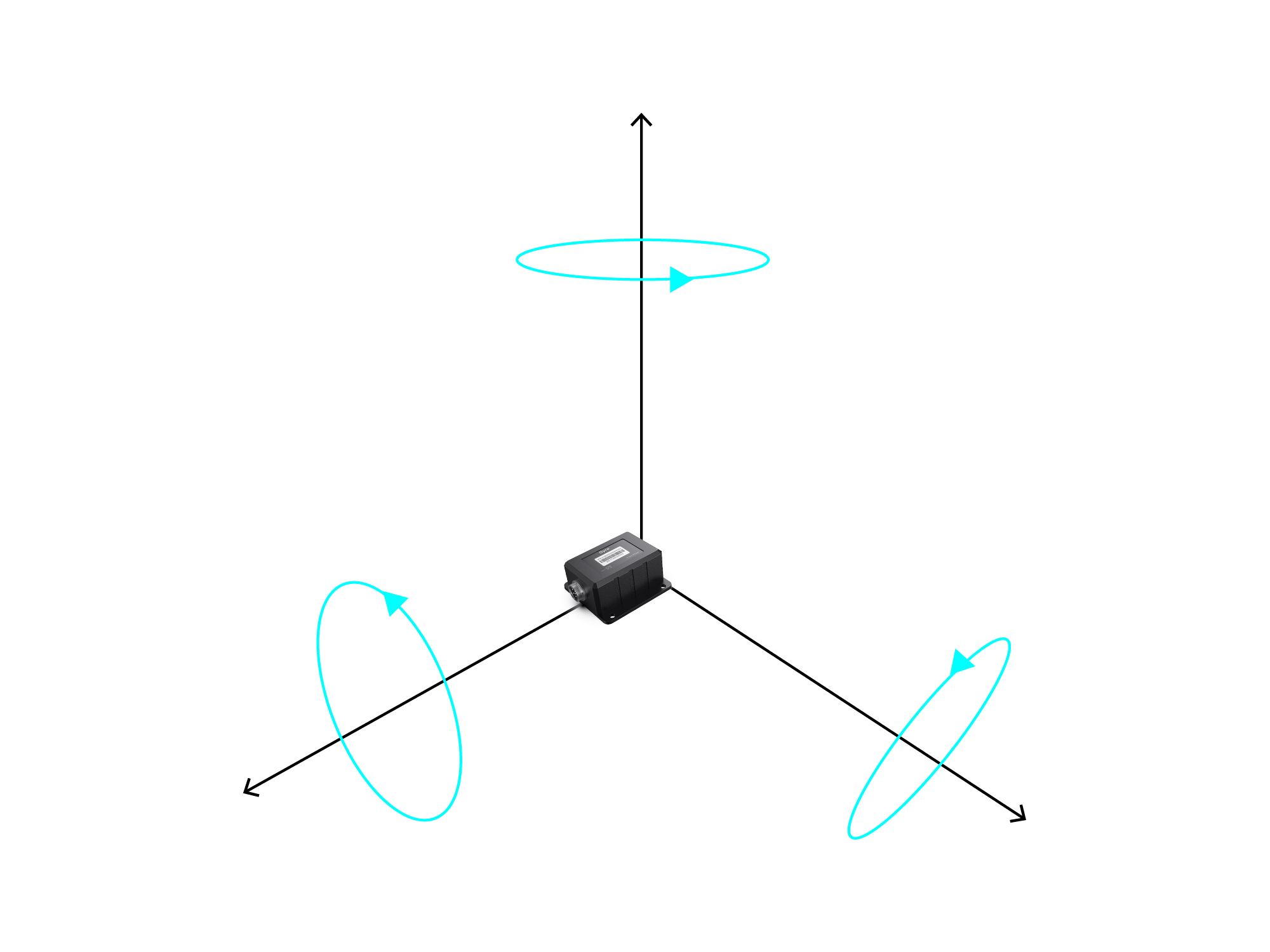
2. IMU Data (Inertial Measurement Unit)
An IMU measures a tractor’s orientation (pitch, roll, yaw) and angular velocity using accelerometers and gyroscopes. It detects any changes in the tractor’s movement or orientation, such as:
- Pitch: The up-and-down motion of the tractor’s front and back.
- Roll: The side-to-side tilt of the tractor.
- Yaw: The direction the tractor is facing (left or right turns).
IMUs are independent of external signals, making them highly useful in conditions where GNSS signals are weak or unavailable, like in forests, tunnels, or areas with high electromagnetic interference.
3. Data Fusion
To achieve continuous, high-precision control of the tractor, the GNSS and IMU data are fused using algorithms like Kalman filtering or sensor fusion techniques. Here’s how they work together:
- GNSS for position tracking: Provides accurate position data over large distances. However, when GNSS signals become weak or lose lock, the system may experience gaps in position information.
- IMU for orientation and short-term corrections: While GNSS can have occasional signal disruptions, the IMU provides continuous tracking of the tractor’s orientation, allowing the system to detect and compensate for small deviations in heading or terrain variations.
Key Benefits of IMU in Tractor GNSS Auto Steering System
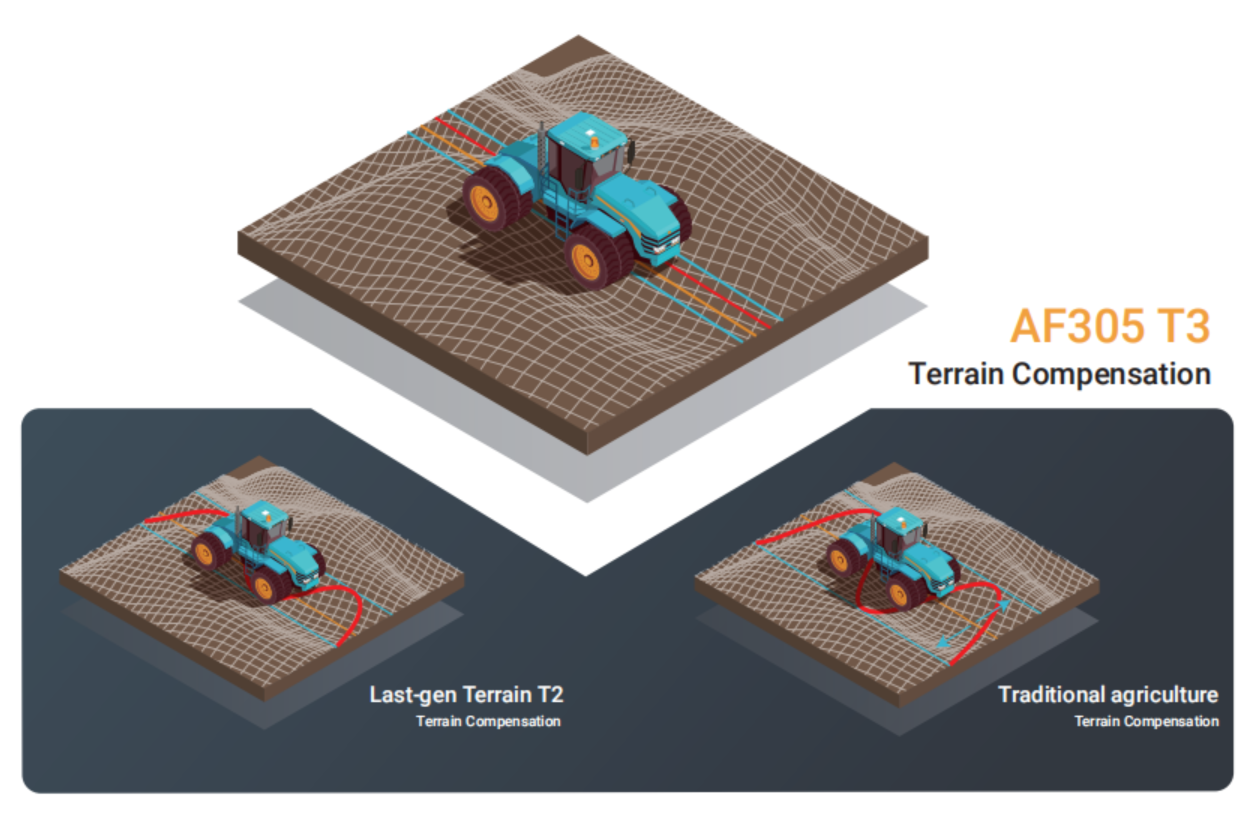
- Improved Precision and Reduced Error: By providing orientation data, the IMU helps the tractor follow its planned path more accurately, even in challenging conditions. This reduces errors such as overlap or missed areas between rows, improving field efficiency.
- Enhanced Performance in Low GNSS Signal Areas: In environments where GNSS signals are weak—such as near large structures, under dense crop canopies, or in hilly terrain—the IMU can maintain stable tractor control. It continuously monitors orientation, ensuring the vehicle stays on course despite poor satellite visibility.
- Increased Operational Efficiency: With the added precision provided by the IMU, tractor Auto-Steering systems can operate faster, optimizing fuel use and reducing wear and tear on the equipment. This leads to higher productivity in the field.
- Effective in Complex Field Layouts: The IMU allows the tractor to navigate complex and irregular field layouts with ease, minimizing the risk of overlap or missing areas. This capability is particularly important in fields with curved rows, irregular boundaries, or obstacles.
Conclusion
IMU technology plays a crucial role in enhancing the performance and accuracy of GNSS Auto-Steering systems in agricultural machinery. By providing real-time data on vehicle orientation, the IMU complements the GNSS receiver and ensures precise, efficient operation of tractors, even in challenging conditions. The fusion of these technologies optimizes fieldwork, reducing errors and improving productivity, which is essential for modern farming practices.
Reference:
Precision Agriculture: An Overview of Applications and Technologies, University of California Division of Agriculture and Natural Resources (2023).
Applications of IMU Technology in Autonomous Agricultural Vehicles,” Journal of Field Robotics, 2022.
Integrated GNSS and IMU Navigation for Autonomous Agricultural Machinery,” International Journal of Agricultural and Biological Engineering, 2023.
Fusion of GNSS and IMU for High-Precision Navigation in Agricultural Applications,” Computers and Electronics in Agriculture, 2022.
The Role of IMUs in Enhancing GNSS Accuracy for Agricultural Auto-Steering Systems,” Agricultural Engineering Journal, 2023.
Recent Advances in IMU Applications in Precision Agriculture,” Journal of Agricultural Engineering, 2023.