
1 Smart Agriculture Software 1.4.110 Version Update Notes
1.1 Purpose
The main purpose of the company’s software updates and iterations is to improve and optimize the software’s functionality, performance and user experience to meet ever-changing customer needs and maintain the software’s competitiveness and market share; the purpose of updates and iterations is to fix vulnerabilities and errors, improve functionality, improve performance, improve compatibility, and be more secure.
1.2 scope
Make it public within the company to ensure that all relevant departments and employees are aware of and can try out the new version of the software.
2 New features and optimization of the software
2.1 New and adjusted features
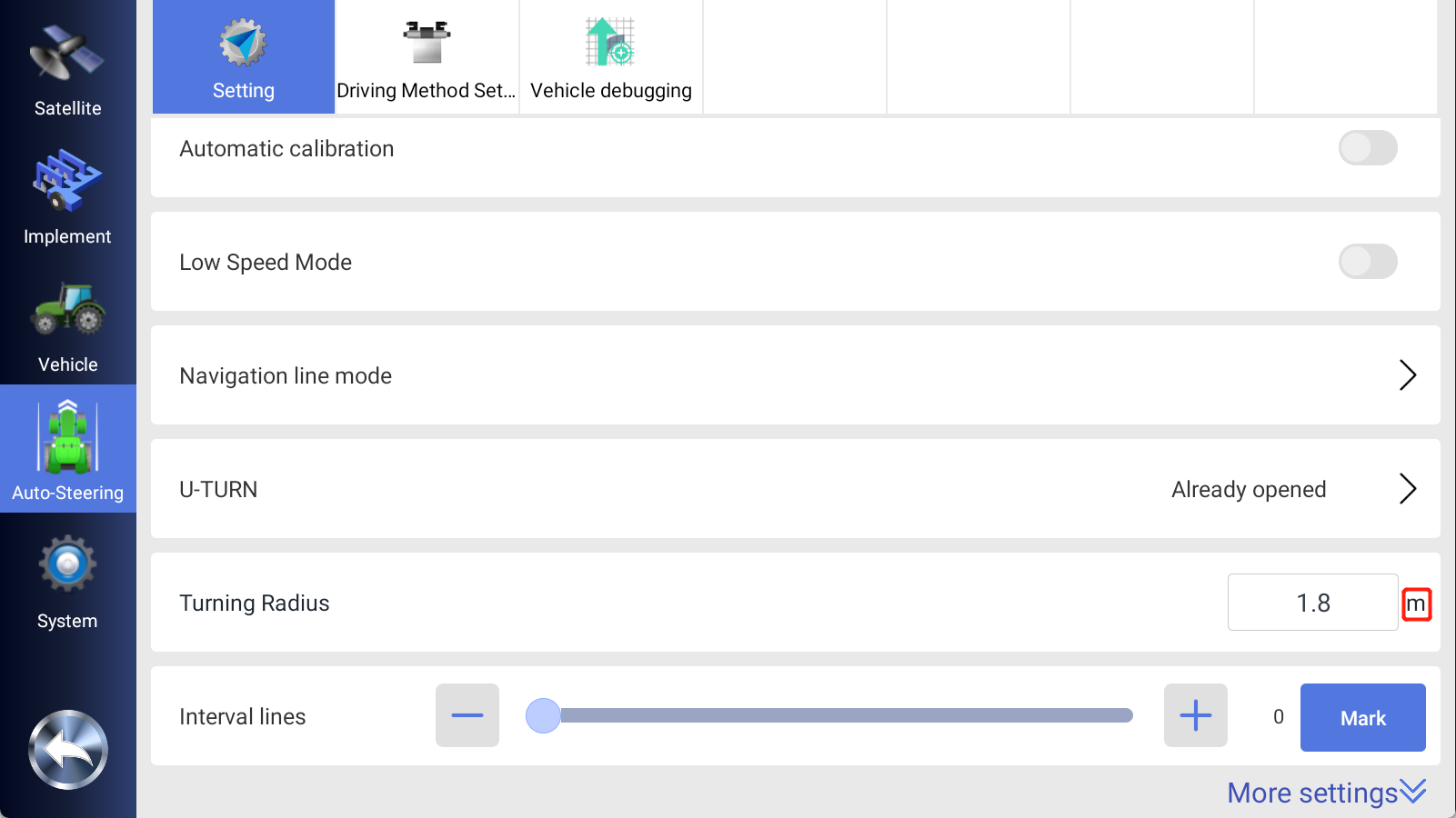
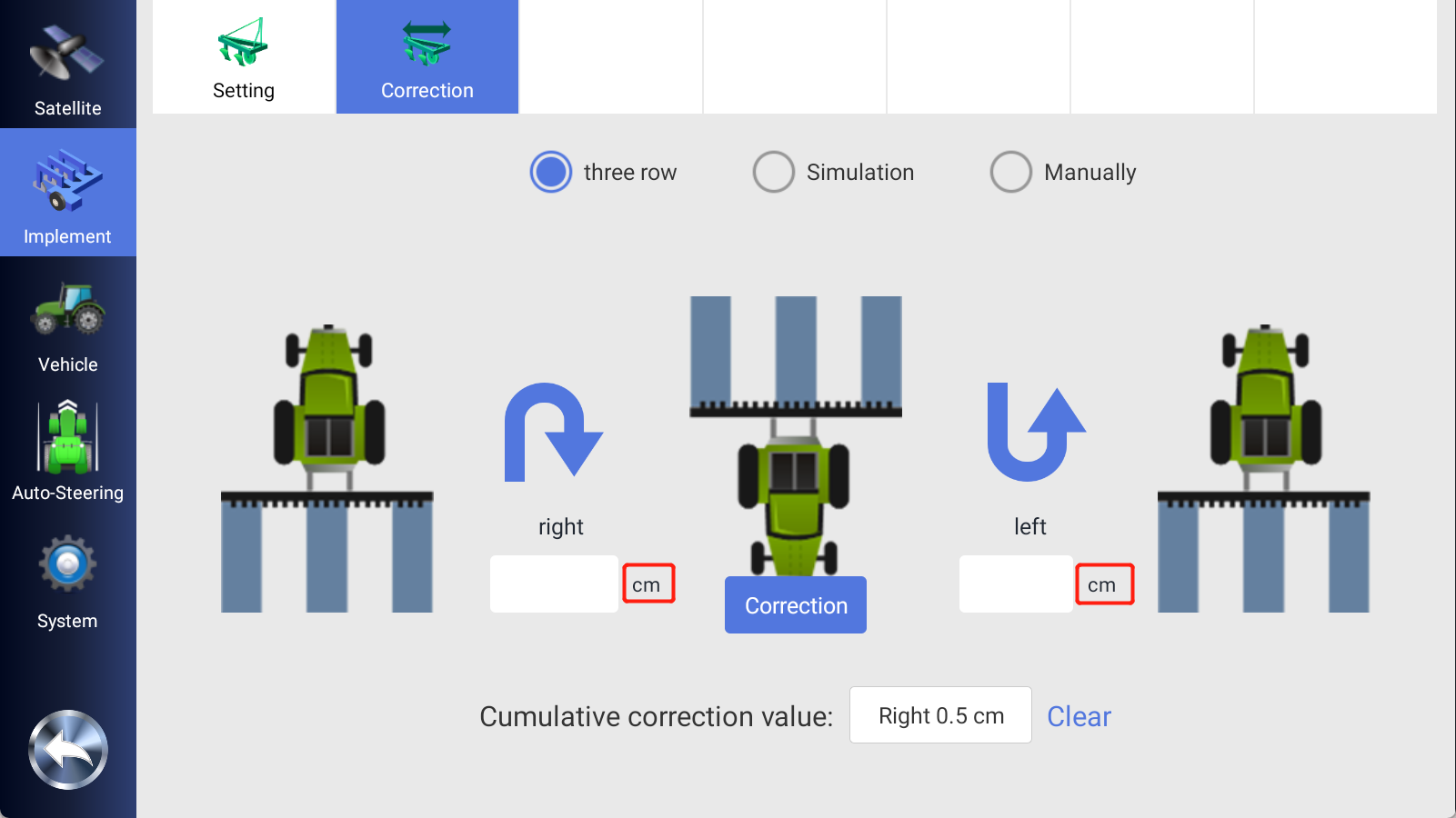
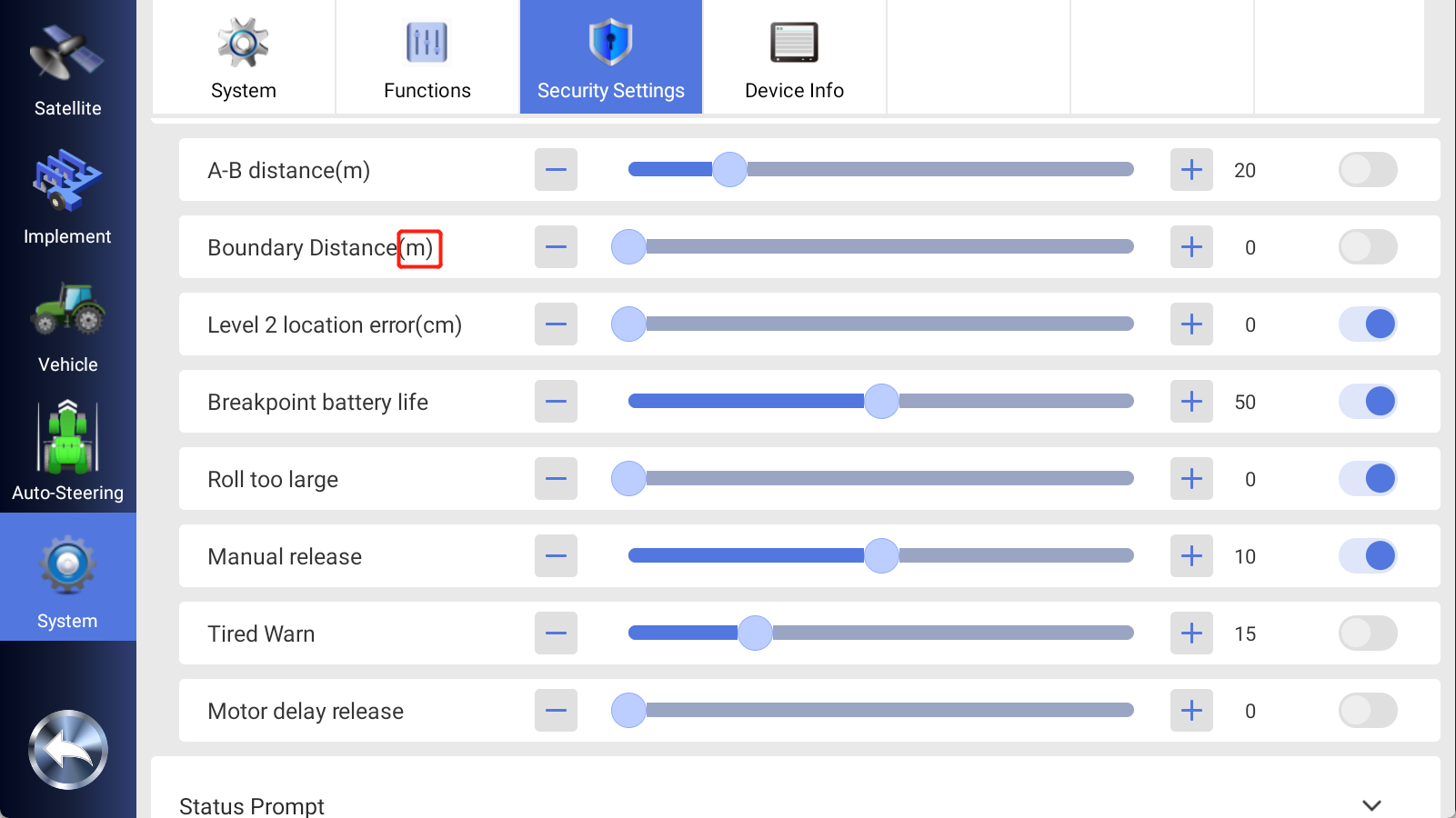
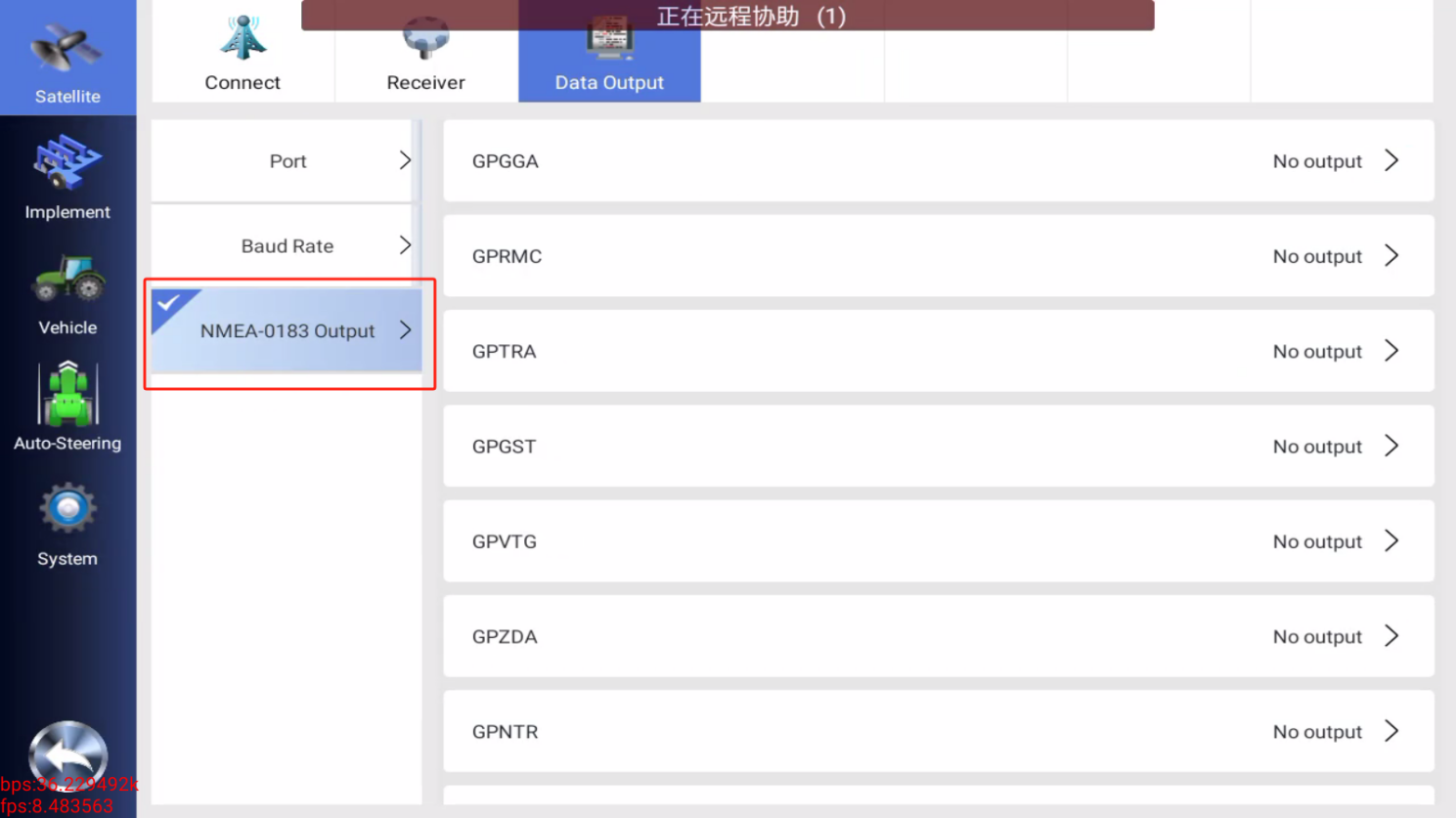
- New corresponding unit display and data output type translation adjustments for turning radius, three-line method, and distance boundary position.
2.2 Software optimization and repair
- Optimize the start/end navigation motor instructions,solve the problem that the start/end navigation occasionally does not work;
- Optimize the reconnection mechanism of Beidou base station 1 and Beidou base station 4 (under weak network conditions);
- Optimize the issue of length unit affecting angle sensor ratio setting;
- Optimize the filtering of invalid data to prevent crashes caused by invalid data;
- Optimize the receiver upgrade judgment logic;
- Fixed the crash issue after setting AB line (caused by no plots on the farm).
2.3 Algorithm optimization
- No modifications yet.
3 Vehicle debugging and application scenario description
3.1 Vehicle debugging and operating instructions
- Mode 3
Single gyro solution:
Vehicle debugging instructions: Measure and fill in the corresponding vehicle parameters – roll debugging – rotation ratio debugging – azimuth debugging (turn on the automatic calibration function, set a straight line on a flat ground, and turn off the automatic calibration when the error remains 0cm after driving a certain distance. The purpose is to automatically obtain the azimuth) – repeat line debugging.
Parameter description: The new version mode three removes sensitivity, fixed forward sight, and transmission coefficient parameters. After the vehicle is debugged, the slope correction of the navigation setting interface is turned on and the automatic calibration is turned off. During the vehicle debugging, ensure that the transmission ratio is debugged. It can be used normally according to the debugged values without adjusting any parameters. Motor speed: 15.
Dual gyro solution:
Vehicle debugging instructions: Measure and fill in the corresponding vehicle parameters – roll debugging – azimuth debugging (turn on the automatic calibration function, set a straight line on a flat ground, and turn off the automatic calibration when the error remains 0cm after driving a certain distance. The purpose is to automatically obtain the azimuth) – repeat line debugging.
Usage parameter description: The new version mode three removes sensitivity and fixes forward vision. After the vehicle is debugged, the slope correction of the navigation setting interface is turned on and the automatic calibration is turned off. No parameters need to be adjusted for normal use. Motor speed: 15.
Note: The mode three algorithm is adaptively adjusted (using speed and control as a correlation). In dual-antenna/single-gyro mode, the steering wheel correction amplitude frequency will rotate faster than the original algorithm in the 1-6 km range. The single-antenna single-gyro steering wheel rotation will be more stable than the dual-antenna single-gyro steering wheel rotation (dual-antenna single-gyro uses dual-antenna roll, single-antenna single-gyro uses gyro roll).
3.2 Software application scenario description
1)Single gyro:
- Low-horsepower vehicles support 1-7 kilometers, and high-horsepower vehicles support 1-15 kilometers in general conditions;
- The vehicle should have no obvious pressure relief and gap;
- The terrain is flat, the slope is within 7 degrees, and there is no obvious bumps. If the vehicle and terrain conditions do not meet the above conditions, it is recommended to use the dual gyro solution.
2)Double Gyro:
- Supports general terrain operation of 0.15-15 km ;
- The vehicle is allowed to have a small amount of clearance or pressure relief . If there is clearance or pressure relief, the operation effect will be deteriorated ;
- The terrain allows for slight bumps .
3)Other notes:
- For low-horsepower models (less than 60 horsepower), it is recommended to directly adjust the double gyro to ensure the use effect;
- The use effect cannot be guaranteed if the vehicle gap is obvious or the pressure relief is serious;
- Sandy land and severely bumpy terrain cannot meet the use requirements;
- If the ground slope exceeds 7 ° or the slope changes repeatedly from left to right, it will affect the straightness and joint accuracy.